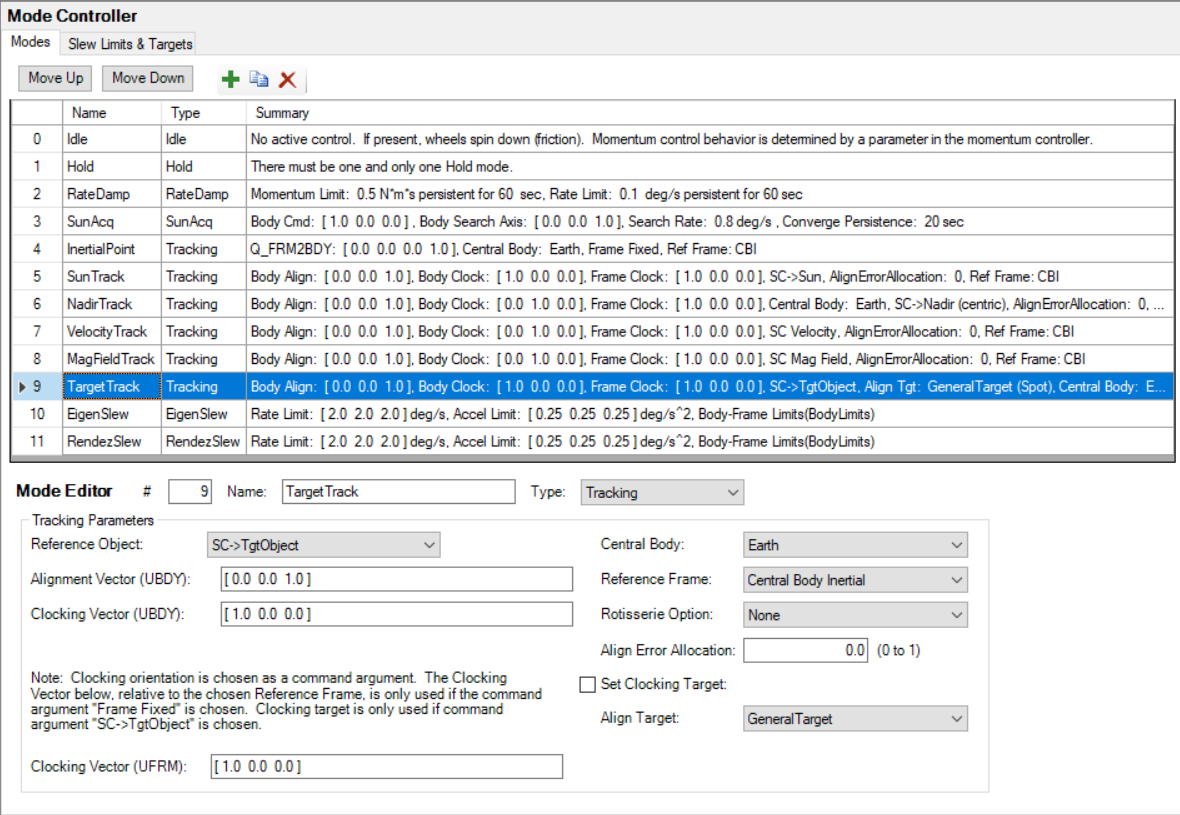
Modes
Use the Modes tab to create, define, and modify the spacecraft's attitude control modes.
The tab is divided into two sections: the Mode List and the Mode Editor. The Mode List contains all configured modes. A new scenario comes with several modes predefined; you are free to add to, edit, or delete these. The Mode Editor section changes dynamically, based on the selected mode. The Editor shows all of the pertinent information about a mode, and enables you to make changes to the mode.
Mode types
The information that appears in the Mode Editor is based on the type of mode that you select. There are seven different mode types:
Idle
In Idle mode, there is no active control of the satellite; however, momentum control is possible if enabled for Idle on the Momentum Controller. If reactions wheels are present, they will spin down as a result of friction.

Hold
Hold mode is used to hold the spacecraft at a given attitude or a rate from an attitude. At the end of a Slew Absolute, Slew Relative, or Rate Damp command, the satellite will automatically transition to Hold.
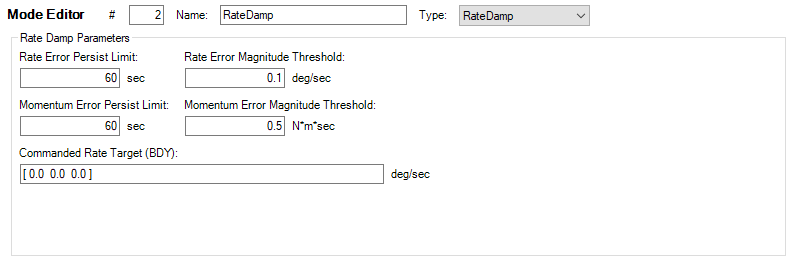
RateDamp
Rate Damp drives the angular rate and momentum of the spacecraft to a target value, typically [0 0 0], without enforcing an attitude pointing command. Rate Damp is completed when the following conditions are met:
- The rate error is within the Rate Error Magnitude Threshold of the Commanded Rate Target for the Rate Error Persist Limit.
- The momentum magnitude is within the Momentum Error Magnitude Threshold of the momentum command (nominally zero) for the Momentum Error Persist Limit.
SunAcq
SunAcq or "Sun Acquisition" is a mode where the spacecraft will use its Sun Sensors to try and locate the sun while spinning about a fixed axis. Once the sun is located, it will align the closest of the commanded vectors with the sun vector. A completion telemetry point is set when this is achieved to a configurable tolerance.

| Parameter | Description | Units |
|---|---|---|
| Command Vector(s) (UBDY) | The commanded vectors are what the SunAcq mode is trying to align with sun vector. Typically these vectors are the vectors perpendicular to a spacecraft's solar panels. Add 3x1 vectors from the dialog box below the list. Delete selected vectors using the delete button at the top of the command vectors listbox. | UVec |
| Slew Limits | Select a slew limit from the Slew Limits and Targets page to be used during the SunAcq slew. | N/A |
| Search Axis (UBDY) | Enter a 3x1 vector in the BDY frame. The spacecraft will rotate about this axis when searching for the sun. | UVec |
| Search Rate | Set the rotation rate of the search about the search axis. | deg/s |
| Sun Converged Angle | Set the angle of the commanded vector that the sun vector has to be within for some amount of time for SunAcq to be considered converged. | deg |
| Sun Converged Time | Set the amount of time the sun vector must be within the sun converged angle of the commanded vector to be considered converged. | s |
| Rate Gain | Set the rate gain for use in the sun search algorithm. | 1/s |
| Integral Gain | Set the integral gain for use in the sun search algorithm. | 1/s2 |
| Integrator Limit (BDY) | Set the integrator limit for use in the sun search algorithm. | rad*s |
| Sun Converged Rotation Rate | Specify a rotation rate after the spacecraft has converged on the sun. | deg/s |
Tracking
Tracking modes allow satellites to track several types of ephemerides. All of the available options are contained within the list of Reference Objects.
![]()
![]()
| Parameter | Description |
|---|---|
| Align Error Allocation | If the align AND clock cannot be fully satisfied, this portion of the error is assigned to the alignment instead of the clock. For example, if the CBI align and clock are 80 degrees apart (BDY orthogonal), then there is a 10 degree error typically on the clock vector. A value of 0.25 here would have 2.5 degrees align error and 7.5 degrees clock error. |
| Align Target | If the reference object is SC -> TgtObject (or any other reference object relative to a target), then the align target dropdown menu will appear. Use this to select a Target Object for the spacecraft to point to. |
| Alignment Vector (UBDY) | Specify a 3x1 vector in the BDY frame that will point at the selected reference object. For example, [1, 0, 0] will point the BDY X axis toward the reference object. |
| Attitude | If the reference object is Frame Fixed, then a quaternion/DCM input box will appear. This enables you to set how the spacecraft will orient its BDY frame relative to a selected central body reference frame. |
| Central Body | Some reference objects enable you to pick which Central Body the object relates to. For example, satellites can point at nadir (centric) by selecting SC -> Nadir (centric) as the reference object. You then have the option to pick if you want to point at earth nadir or sun nadir (or other bodies if they are available). |
| Clocking Vector (UBDY) | Specify a 3x1 vector in the BDY frame that will point at a clocking object while aligning. The align constraint is satisfied first, then the clocking constraint determines the desired rotation of the spacecraft about the alignment axis. It is common that the clock constraint is not fully satisfied. Clocking objects are selected as an argument of the command, not from the Mode Controller page. This prevents the number of modes from growing quite large. |
| Clocking Vector (UFRM) | If the clocking option is set to Frame Fixed, this 3x1 vector determines what direction in the reference frame the spacecraft will attempt to clock to. |
| Inertial Align Vector (UFRM) | If the reference object is Frame Vector, then this vector input box will appear. This enables you to align the spacecraft's alignment vector (UBDY) with the reference frame align vector (UFRM). |
| Reference Frame | If the reference object is **Frame Fixed** or **Frame Vector**, you can select which frame the quaternion/DCM (**Frame Fixed**) or vector (**Frame Vector**) is relative to. The available frames are "Central Body Inertial" , "Central Body Fixed", "Radial, In-Track, Cross Track", and "Velocity, Normal, Co-Normal". |
| Reference Object | Determines which Reference Object the spacecraft will attempt to point at. |
| Rotisserie Option | The rotisserie option enables you to set the spacecraft in a constant spin during a tracking mode. You can select one of three options: None, Align, or Align-Cross-Clock. Additional rotisserie options are enabled after selecting Align and Align-Cross-Clock modes. In Align, the spacecraft will spin at a constant rate about the align axis specified in the mode, even as the spacecraft dynamically tracks the mode's reference object. In Align-Cross-Clock, the spacecraft will rotate about the axis defined by the alignment axis and the initial clocking axis; if the clocking vector changes over time, the spacecraft will not track that change. The inertial spin axis will only be affected by changes to the alignment axis. |
| Rotisserie Rate | Defines the rate at which the spacecraft will spin about the specified axis, in degrees per second. The rate can be defined as positive or negative, which corresponds to positive or negative spins about the rotisserie axis. |
| Set Clocking Target | If checked, this box enables you select a specific Target Object to clock to. |
EigenSlew
EigenSlew is one of the two types of modes that is used to slew between spacecraft attitudes. You must select a Slew Limit to assign to each EigenSlew mode.
EigenSlew modes use a trapezoidal angular rate profile about an eigenaxis with starting and ending rates of zero. While EigenSlews are often faster than RendezSlews, they also have settling transients upon start and stop given that start/end conditions typically do not have rates of zero.

RendezSlew
RendezSlew is one of the two types of modes that is used to slew between spacecraft attitudes. You must select a Slew Limit to assign to each RendezSlew mode.
RendezSlew modes are able to slew from any initial attitude/rate condition to any final attitude/rate condition with no settling transient. This proprietary algorithm solves a two-point boundary value (TBPV) problem by solving a set of polynomial coefficients. This slew method is typically used when transitioning to point at targets or scans.
